


|
|
 |
Adafruit Ultimate GPS Breakout Canaux: 66 Sensibilité: -165 dBm Consommation: 20 mA Indicateur led Antenne interne Connecteur UFL pour antenne GPS externe RTC battery-compatible Built-in datalogging >25Km altitude Dimensions: 70 x 54 x 8 mm |
|
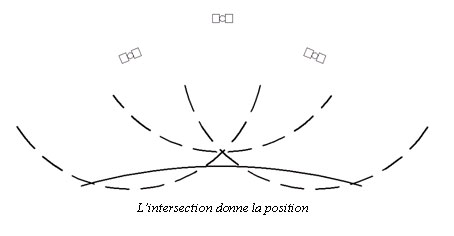
Principe du GPS

Précision de notre GPS
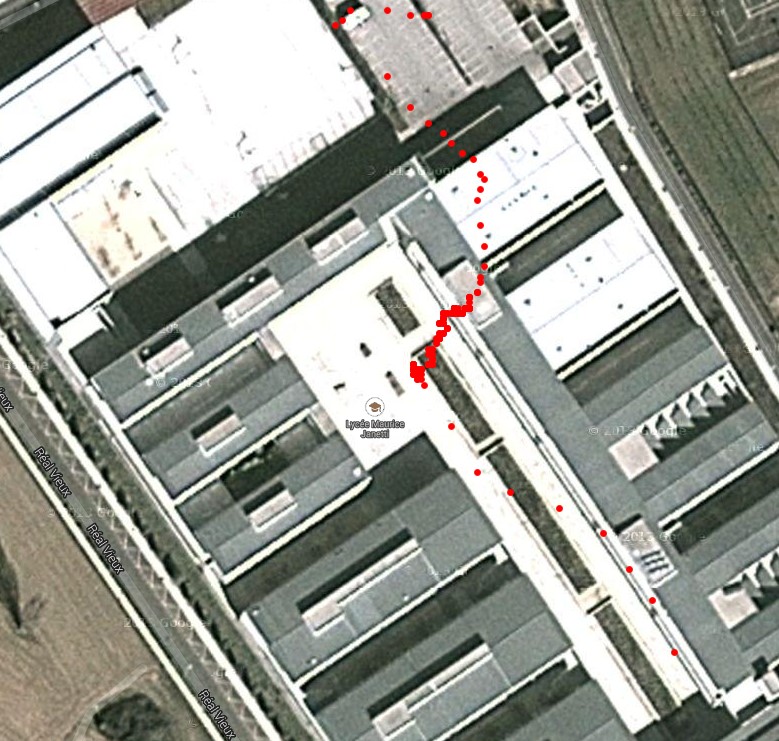

Après suppression des premières mesures et retour au chaud de Clément :


Soit une précision de 8 m environ...
Le rectangle rouge représente l'intervalle de confiance à 95 % (moyenne ± deux fois l'écart type).
La précision théorique d'un GPS est de 20 à 25 m. Mais comme le
montre notre expérience en prenant la moyenne d'une série de mesure
on réduit
cette erreur.![]()
Il faut environ 30 minutes au GPS pour télécharger les éphémérides permettant de calculer la position des satellites, correction d'horloge, données pour la correction ionosphérique, ainsi que les messages spéciaux du système. Ces éphémérides sont valables environ 4 h (warm start possible) . Ainsi durant les 30 premières minutes de fonctionnement (cold start) notre GPS manque de précision comme le montre la première série de photo.
Voici un tutoriel vidéo (en anglais) pour utiliser l'arduino avec un
GPS et Google Earth...